N = 1024; % signal length
x = [1 zeros(1, N-1)]; % impulse
y = [1 zeros(1, N-1)]; % output buffer
for n=2:N
y(n) = x(n)+x(n-1); % impulse response
end
Y = fft(y); % frequency response
Y = abs(Y(1:N/2)); % amplitude response (positive frequencies)
fn = [0:N/2-1]/N; % frequency axis
subplot(211); plot(fn, Y); grid;
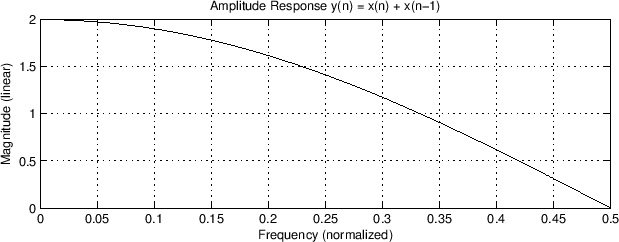
title('Amplitude Response y(n) = x(n) + x(n-1)');
xlabel('Frequency (normalized)');
ylabel('Magnitude (linear)');
Figure 6:
Magnitude response for the filter
y(n) = x(n) + x(n-1).
|
 |
``Mus 270a: Introduction to Digital Filters''
by Tamara Smyth,
Department of Music, University of California, San Diego.
Download PDF version (filters.pdf)
Download compressed PostScript version (filters.ps.gz)
Download PDF `4 up' version (filters_4up.pdf)
Download compressed PostScript `4 up' version (filters_4up.ps.gz)
Copyright © 2019-02-25 by Tamara Smyth.
Please email errata, comments, and suggestions to Tamara Smyth<trsmyth@ucsd.edu>